Recently Published by Autodesk Researchers
Autodesk Research teams regularly contribute to peer-reviewed scientific journals and present at conferences around the world. Check out some recent publications from Autodesk Researchers.
Adaptive Robotic Construction of Wood Frames
Automated robotic construction of wood frames faces significant challenges, particularly in the perception of large studs and maintaining tight assembly tolerances amidst the natural variability and dimensional instability of wood. To address these challenges, the team introduces a novel multi-modal, multi-stage perception strategy for adaptive robotic construction for wood light-frame assembly. The strategy employs a coarse-to-fine method of perception by integrating deep learning-based stud pose estimation with subsequent stages of pose refinement, combining the flexibility of AI-based approaches with the precision of traditional computer vision techniques. The team demonstrates this strategy through experimental validation and construction of two different wall designs, using both low- and high-quality framing lumber, and achieve far better precision than construction industry guidelines suggest for designs of similar dimension.
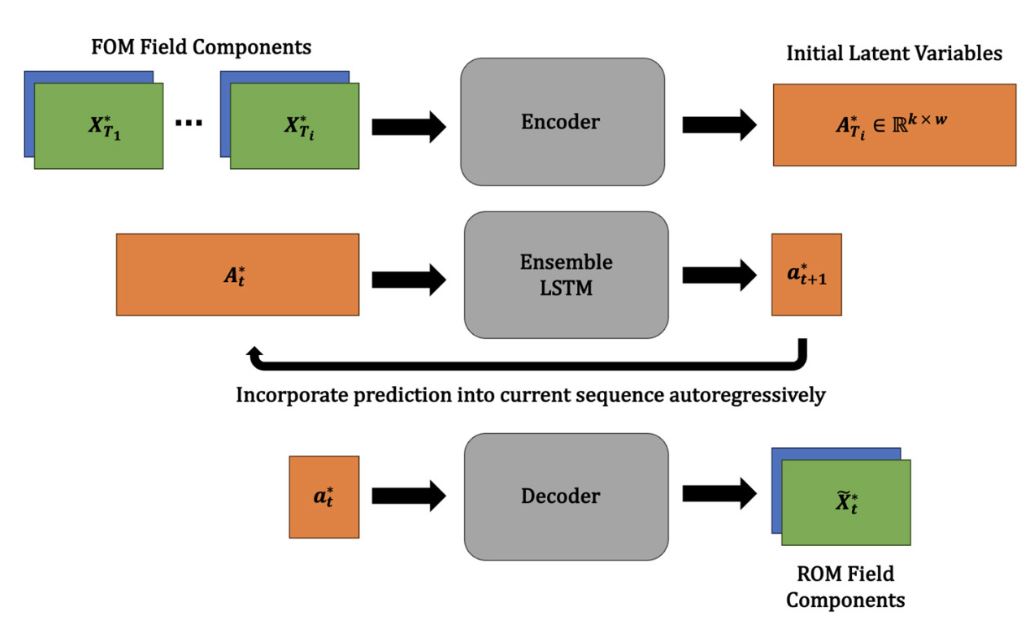
Reduced-order Modeling of Unsteady Fluid Flow using Neural Network Ensembles
The use of deep learning has become increasingly popular in reduced-order models (ROMs) to obtain low-dimensional representations of full-order models. Convolutional autoencoders (CAEs) are often used as they are adept at handling data that are spatially distributed, including solutions to partial differential equations. When applied to unsteady physics problems, ROMs also require a model for time-series prediction of the low-dimensional latent variables. Long short-term memory (LSTM) networks, a type of recurrent neural network useful for modeling sequential data, are frequently employed in data-driven ROMs for autoregressive time-series prediction. In this work, the team proposes using bagging, a commonly used ensemble learning technique, to develop a fully data-driven ROM framework referred to as the CAE-eLSTM ROM that uses CAEs for spatial reconstruction of the full-order model and LSTM ensembles for time-series prediction. When applied to two unsteady fluid dynamics problems, the results show that the presented framework effectively reduces error propagation and leads to more accurate time-series prediction of latent variables at unseen points.
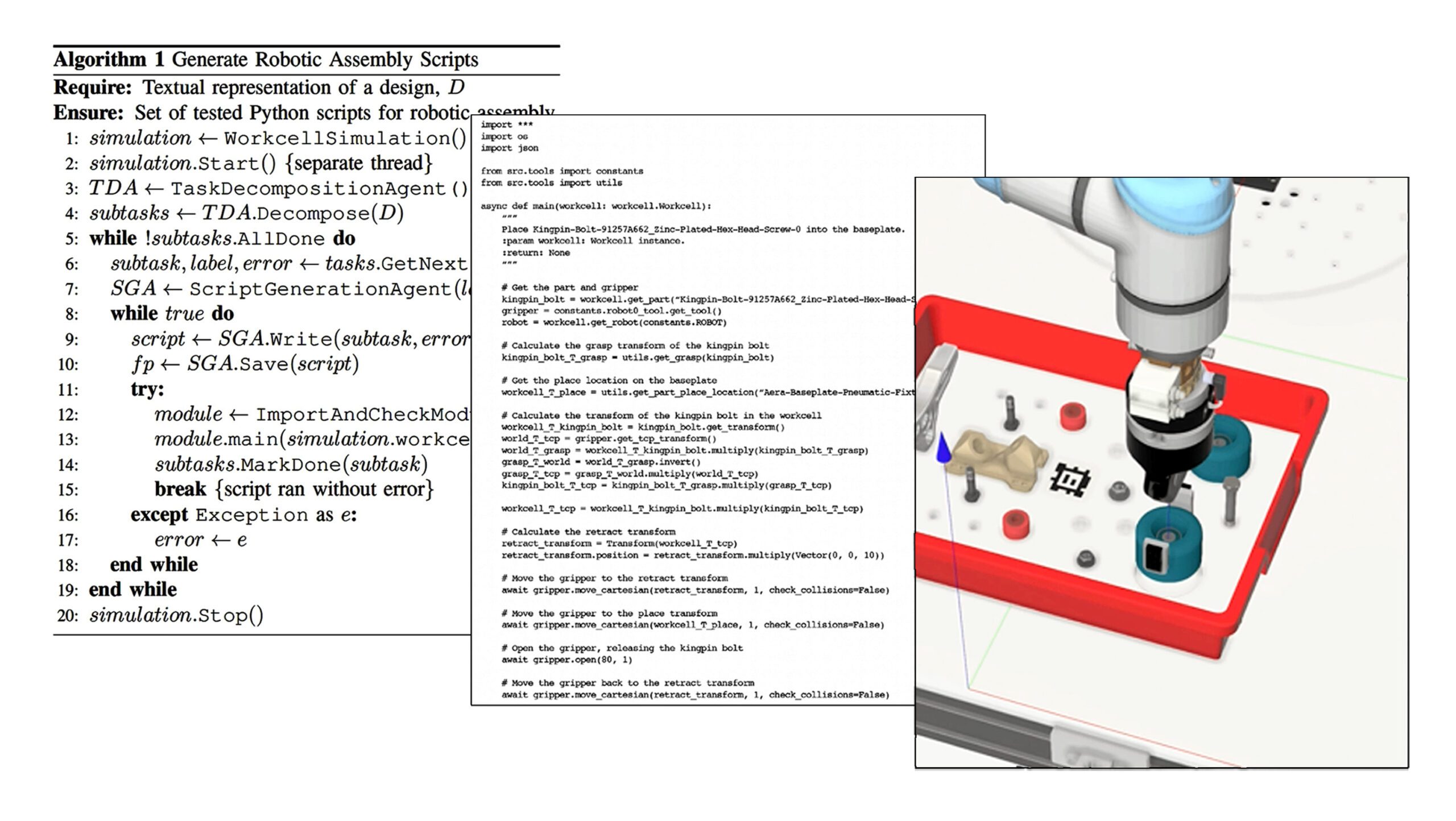
Toward Automated Programming for Robotic Assembly Using ChatGPT
Despite significant technological advancements, the process of programming robots for adaptive assembly remains labor-intensive, demanding expertise in multiple domains and often resulting in task-specific, inflexible code. This work explores the potential of Large Language Models (LLMs), like ChatGPT, to automate this process, leveraging their ability to understand natural language instructions, generalize examples to new tasks, and write code. The team presents a novel system that uses ChatGPT to automate the process of programming robots for adaptive assembly by decomposing complex tasks into simpler subtasks, generating robot control code, executing the code in a simulated workcell, and debugging syntax and control errors, such as collisions. The paper outlines the architecture of this system and strategies for task decomposition and code generation and demonstrates how this system can autonomously program robots for various assembly tasks in a real-world project.
Get in touch
Have we piqued your interest? Get in touch if you’d like to learn more about Autodesk Research, our projects, people, and potential collaboration opportunities
Contact us