Recently Published by Autodesk Researchers
Autodesk Research teams regularly contribute to peer-reviewed scientific journals and present at conferences around the world. These are some recent publications from Autodesk Researchers.
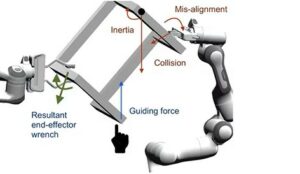
A Force-Mediated Controller for Cooperative Object Manipulation with Independent Autonomous Robots
In this paper, researchers consider cooperative manipulation by multiple robots assisting a leader when information about the manipulation task, environment, and team of helpers is unavailable, and without the use of explicit communication. The team presented a controller, proved its stability, and demonstrated its utility through experiments.
Small fillers are commonly added to polymer foams to create composite foams that can significantly improve foam properties. In this work, the team presented a hybrid lattice Boltzmann method-molecular dynamics-immersed boundary method model for simulating the foaming process of polymer composites.
BeNTO: Beam Network Topology Optimization
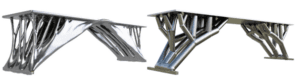
This team explored an optimization framework that allows designers and engineers to develop conceptual designs for structures that can be manufactured using a network of connected beams. Nigel Morris, Senior Manager and Principal Research Scientist at Autodesk, shared more about this project in a recently published blog post.
CAPRI-Net: Learning Compact CAD Shapes with Adaptive Primitive Assembly
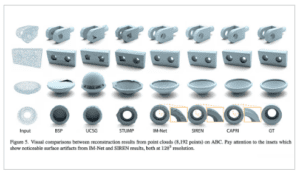 This paper introduces CAPRI-net, a self-supervised neural network for learning compact and interpretable implicit representations of 3D CAD models. When provided with a 3D shape, the network reconstructs it by an assembly of quadratic surface primitives via constructive solid geometry (CSG) operations. This process leads to faithful 3D reconstructions with sharp edges and plausible CSG trees.
This paper introduces CAPRI-net, a self-supervised neural network for learning compact and interpretable implicit representations of 3D CAD models. When provided with a 3D shape, the network reconstructs it by an assembly of quadratic surface primitives via constructive solid geometry (CSG) operations. This process leads to faithful 3D reconstructions with sharp edges and plausible CSG trees.
Evolving Through the Looking Glass: Learning Improved Search Spaces with Variational Autoencoders
Nature has spent billions of years perfecting our genetic representations, making them evolvable and expressive. Generative machine learning offers a shortcut: learn an evolvable latent space with implicit biases towards better solutions. This paper explores SOLVE: Search space Optimization with Latent Variable Evolution, which creates a dataset of solutions that satisfy extra problem criteria or heuristics, generates a new latent search space, and uses a genetic algorithm to search within this new space to find solutions that meet the overall objective.
Get in touch
Have we piqued your interest? Get in touch if you’d like to learn more about Autodesk Research, our projects, people, and potential collaboration opportunities
Contact us